Erfindungen für die Schifffahrt

Über Jahrhunderte war Schifffahrt auf den Weltmeeren ein Abenteuer. Es ging anfangs noch in unbekannte Welten und dabei war die exakte Navigation oftmals „Glücksache“. An eine Kommunikation mit der Außenwelt war gar nicht zu denken; man war ganz
allein in grenzenloser Weite …
Die heutige hohe Verkehrssicherheit der internationalen Schifffahrt beruht auf einer rasanten technischen Entwicklung in den letzten 120 Jahren. Wussten Sie, dass Kieler Firmen und deren Techniker und Erfinder daran einen ganz maßgeblichen Anteil hatten?
Erfinder des Echolots - Hydroakustik
Dr. med. h.c. Alexander Behm (1880-1952)
„Für den Menschen wären Raum und Zeit leere Begriffe, hätten sie nicht durch das Messen Wesen und Gestalt bekommen.“ Arnold Zenkert, Sonnenuhrspezialist
Die vielfältigen Möglichkeiten der Messtechnik im Wasser erschloss Alexander Behm durch seinen unbändigen Erfindergeist und schrieb damit Weltgeschichte in unserer Stadt. Vor 110 Jahren, am 24. September 1912, reichte Alexander Behm sein Echolotkonzept zum Patent ein. Von der Idee her war das Echolot geboren.
Behm war Schüler der berühmten Nord Schleswiger Domschule in Hadersleben, der heutigen Katedral-Skole, die bereits 98 Jahre vor der Kieler Universität gegründet wurde und eine der ältesten Schulen in Nordeuropa ist. Sein kluger Lehrer an dieser Schule, Professor Konrad Dunker, erkannte die auffallende und sehr spezielle Begabung des jungen Alexander für technische Zusammenhänge und sein ideenreiches, praktisch-konstruktives Geschick. Das beispielhafte pädagogische Interesse seines Lehrers Dunker und dessen Förderung des jungen Alexander waren von entscheidender Bedeutung für den erfolgreichen Lebensweg von Behm.
Während mehrerer Jahre als Assistent an einem physikalischen Institut in Karlsruhe entwickelte Behm einen Schallstärkenmesser (Sonometer), der Basis für die Entwicklung des Echolots war. Ende 1904 übernahm Behm die Leitung eines von ihm gegründeten, für einen Industrieverband arbeitenden technischen Forschungslabors in Mödling in Niederösterreich. Hier führte er neben wärmetechnischen Untersuchungen solche zur Raumakustik und Schallisolation durch.
Nach der Patentanmeldung des Sonometers im Jahr 1912 erfolgte der Wohnortwechsel nach Kiel, wo er in der Firma von Hermann Anschütz-Kaempfe an seiner Erfindung weiterarbeiten konnte. Den Durchbruch brachten jedoch seine Echolotentwicklungen in den Folgejahren auf der Basis der Echozeit und sein Kurzzeitmesser, mit dem kleinste Zeiteinheiten in technisch einfacher und bordtauglicher Weise messbar wurden. Patente hierfür erhielt er 1916 und 1920. Zur wirtschaftlichen Verwertung dieser Erfindung gründete er 1920 in Kiel die Behm-Echolot-Gesellschaft.
Ähnlich wie der fast zeitgleich von Anschütz und Einstein in Kiel erfundene Kreiselkompass revolutionierte auch das hier entwickelte Echolot die Seefahrt bis heute, denn es hat unverändert eine eminente Bedeutung für jedes Wasserfahrzeug, verhindert es doch Grundberührung und Strandung. Das in Kiel vollendete „Behmlot“, wie es damals allgemein in der Schifffahrt genannt wurde, war das erste zuverlässig funktionierende Echolot weltweit. Es ersetzte die bis dahin sehr ungenaue und nur bei gestoppter Schiffsfahrt mögliche Tiefenmessung mittels eines Bleigewichts an einer markierten Leine. Den sprunghaften Fortschritt durch das Behmlot kann man sich heute kaum vorstellen: Bereits 1915 war eine regelmäßige und sehr genaue Tiefenmessung mit dem Behmlot bis zu einer Schiffsgeschwindigkeit von zehn Knoten möglich.

Behm entwickelte auch Luft-Lote, die in Zeppelinen bei Nacht oder Nebel eingesetzt werden konnten und für die Flugsicherheit von größtem Interesse waren. So konnte nicht nur die Höhe über dem Meeresspiegel, sondern auch der viel wichtigere Abstand zum Boden exakt gemessen werden. Das Luftschiff GRAF ZEPPELIN, das 1929 die Welt umrundete, hatte ein solches Behmlot für Höhenmessungen eingebaut.
Aus dieser Erfindung gingen zahlreiche Weiterentwicklungen hervor. So wurde Behms Tiefsee-Echolot benutzt, um Telefon-Seekabel in großen Meerestiefen zu verlegen. Und bis heute basieren die Grundlagen für die Wracksuche und Kartographie auf Behm´s Prinzip.
Es ist schon sehr erstaunlich und ziemlich ungewöhnlich, dass diese beiden für die Schifffahrt so eminent wichtigen Navigationssysteme, Echolot und Kreiselkompass, fast zeitgleich in Kiel erfunden wurden und damit gleich zwei einzigartige Kapitel der Seefahrtsgeschichte in unserer Stadt geschrieben wurden.
In der Folge seiner Erfindung des Echolots gelangen Dr. Behm herausragende Erfindungen in der Medizintechnik, speziell der Sonographie. Dies würdigt die „Deutsche Gesellschaft für Ultraschall-Medizin“ wie folgt:
„Das erste funktionsfähige Echolot in der Schifffahrt wurde nach seinem Erfinder auch als BEHMLOT bezeichnet. Alle nachfolgenden Erfindungen, auch die späteren medizinischen Anwendungen dieser Grundlagen, gehen auf die überzeugende Entwicklung von Behm zurück.“
Bereits 1952 gelangen dann die ersten zweidimensionalen Ultraschall-Schnittbilder menschlicher Organe. Behm verstarb im gleichen Jahr und erlebte diese Entwicklung, die auf seiner Grundlagenforschung beruhte, nicht mehr mit.
Behms Erfinderpersönlichkeit wurde auch mit der Verleihung der Ehrendoktorwürde der Medizinischen Fakultät der Universität Kiel anlässlich der Eröffnung der neu erbauten Medizinischen Universitätsklinik am 25.11.1928 gewürdigt. Kurz zuvor, am 22. September 1928, wurde ihm sogar die große Ehre zuteil, vor der ehrwürdigen „Deutschen Gesellschaft der Naturforscher und Ärzte“ über sein erfundenes Echolot einen Vortrag zu halten.
Auf Initiative des Vereins „Maritime Denkmale e.V.“ wird seit 2022 dem genialen Erfinder Dr. Alexander Behm mit einer Bronzeskulptur des Künstlers Manfred Sihle-Wissel an der Kiellinie 79 gedacht.
Dr. Redelf Martin Habben - 1. Vorsitzenden des Vereins MARITIME DENKMALE e.V.
Text Überarbeitung: G. Immens

Die Expedition der Meteor 1925 - Echolot

Die Besatzung des Forschungsschiffs „Meteor“ bei der Abreise von
Wilhelmshaven. Die erfolgreiche Atlantik-Expedition dauerte zwei Jahre.
Nach umfangreichen Vorbereitungen begann am 16. April 1925 die „Deutsche Atlantische Expedition“ an Bord des Vermessungsschiffs „Meteor“. Die Expedition dauerte über 2 Jahre, wobei das Schiff vor allem im Südatlantik eingesetzt wurde, um die Wassertiefe dieses bislang weitgehend unbekannten Seegebietes systematisch zu vermessen und zu untersuchen. Zu diesem Zweck wurde die „Meteor“ mit dem Freilot, dem Signallot und den Ultraschall Tiefseeloten von Atlas und Behm ausgestattet. Neben der neuen Schalltechnik nahm man zur Sicherheit zwei Lotmaschinen mit an Bord. Diese motorisierten Winden ermöglichten in rund viereinhalb Stunden eine Wassertiefe von 4.500 Metern zu vermessen: das Senkblei benötigte 33 Minuten bis zum Grund und musste dann 4 Stunden lang von der 12 PS starken Dampfwinde mühsam wieder heraufgezogen werden.
Die „Meteor“ fuhr 13 Mal auf verschiedenen Routen zwischen Afrika und Südamerika hin und her und nahm dabei 67.000 Tiefenmessungen vor. Das war ein neuer Rekord: bis zu diesem Zeitpunkt waren aus allen Weltmeeren zusammen nur 29.000 Lotungen bekannt. Die meisten der Messungen an Bord der „Meteor“ wurden mit den Ultraschall-Echoloten vorgenommen, die sich im Vergleich zu den anderen Lotverfahren nicht nur als sehr genau, sondern vor allem als sehr zeitsparend erwiesen: Schallimpulse legen im Wasser um die 1.500 Meter pro Sekunde zurück, sodass eine Lotung in 4.500 Meter Wassertiefe für den Hin- und Rückweg nur rund 6 Sekunden erfordere. Und dabei muss das Schiff nicht einmal stoppen. Damit gelang Behms Technik der Durchbruch und schon wenige Jahre später führten alle größeren Schiffe Echolote an Bord.
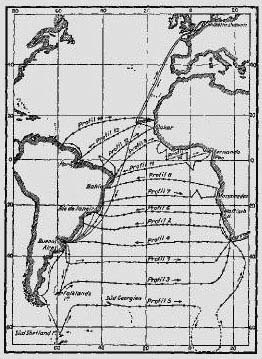
Die Expeditionsroute führte die „Meteor“ mehrfach über den Südatlantik.
Dabei wurden 67.000 Lotungen vorgenommen.
Die neue Methode der Seevermessung revolutionierte nicht nur die Genauigkeit der Seekarten, sondern auch unser Verständnis der Erde. Basierend auf den Daten der „Meteor“ publizierten Theodor Stocks und Georg Wüst 1934 die erste moderne Tiefenkarte des Atlantiks. Sie zeigt die bis dahin detaillierteste Darstellung des Mittelatlantischen Rückens, der Teil des weltumspannenden untermeerischen Gebirgszuges zwischen den Kontinenten ist. Jahrzehnte später entdeckte man, dass diese ozeanischen Rücken der Geburtsort der Erdplatten sind, deren Bewegungen sich regelmäßig durch Erdbeben bemerkbar machen. Georg Wüst wurde nach dem 2. Weltkrieg Direktor des Kieler Instituts für Meereskunde“.
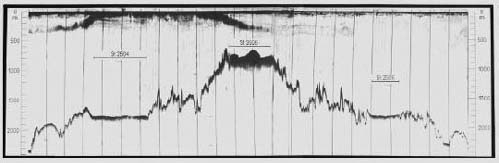
Das Echolotprofil zeigt deutlich den Mittelatlantischen Rücken zwischen Südamerika und Afrika.

Das Forschungsschiff „Meteor“ war mit 2 Kolbenmaschinen ausgerüstet und hatte einen Aktionsradius von 5.000 Seemeilen.
Die Hilfstakelage sollte die Reichweite erhöhen.
Quelle: Buch – Kiel Maritim II - Prof. Dr. Uwe Jenisch
Kreiselprinzip und Funktion - Kreiselkompass
Der Kreisel ist eines der ältesten bekannten Kinderspielzeuge. Der Kreisel wird in Rotation gebracht und hält die Achsrichtung eine ganze Weile präzise bei, kann aber auf einer glatten Unterlage „umherwandern“. Deshalb spricht man hier von einem „freien Kreisel“. Hängt man den Kreisel aber horizontal oder sogar kardanisch (frei beweglich in alle Richtungen) auf, so kann sich dieser nicht mehr frei bewegen und man nennt es dann einen „gefangenen Kreisel“.
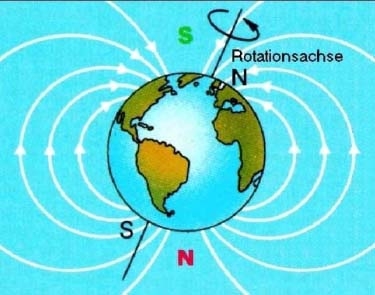
Ein solcher kardanisch aufgehängter Kreisel behält bei Rotation seine Richtung im Raum bei, auch wenn das Tragegestell gedreht wird. Dieses Prinzip machte sich Anschütz bei seiner Erfindung zunutze, weil sich ein solcher Kreisel parallel zur Rotationsachse der Erde orientiert (dies nennt man „meridiansuchend“) und so die Nord-Südrichtung anzeigt. Entscheidend ist dabei der Drehimpuls durch die Erdrotation, wodurch der „gefangene“ Kreisel nicht ausweichen kann und sich immer wieder in die stabile Richtung bringt. Der große Vorteil zum Magnetkompass ist damit klar, denn die Rotationsachse der Erde geht durch die wahren Pole. Ein Magnetkompass hingegen zeigt immer zum magnetischen Pol, der noch dazu beständig „wandert“.
Die Kreiselkräfte der Erde sind natürlich sehr gering, aber die Wirkung der Kraft ist von der Drehgeschwindigkeit des Kreisels abhängig. Deshalb rotieren die Kreisel in einem modernen Kompass von Magneten angetrieben mit sehr hoher Geschwindigkeit.
Einen kleinen Fehler beinhaltet aber auch noch heute der Kreiselkompass: den sogenannten „Fahrtfehler“. Wird der Kreisel in Nord-Süd-Richtung bewegt, dann ergibt sich eine Resultierende aus der Geschwindigkeit der Bewegung des Kreisels und der gleichzeitigen Geschwindigkeit der Erdoberfläche (Hier bei uns ca. 1.000 km/h). Damit wird aber klar, dass der Unterschied bei langsam fahrenden Schiffen nur sehr gering ist. Ein 20 Knoten fahrendes Schiff hätte auf exaktem Nord- oder Südkurs nur einen Fehler von ca. 1° (also fast zu vernachlässigen) zu beachten. Bei höherer Geschwindigkeit wächst dieser Fehler jedoch erheblich an und könnte bei längeren Strecken zum Verfehlen eines „angepeilten“ Ziels führen.
Bei Flugzeugen kommen auch Kreiselkompasse zum Einsatz, dort werden Sie etwas anders betrieben, nicht „gefangen“ sondern als „freie“ Kreisel, kardanisch aufgehängt. Sie fungieren ähnlich wie auf Schiffen als Ergänzung zum Magnet-Kompass und der GPS-Navigation.

Nachdem das Prinzip des Kreiselkompass nunmehr 100 Jahre nahezu unverändert geblieben ist, hat die Kieler Firma Anschütz begonnen mit einem revolutionär neuen Systemen und dem Verfahren zur „hemisphärischen Resonanzmessung“ die nächste Technologie des Kreiselkompass auf den Markt zu bringen.
Kieler Freundschaft - Albert Einstein
Der magnetische Kompass diente seit der griechischen Antike bis vor 120 Jahren allen Seefahrern und Entdeckern zur Navigation. Zu Beginn des 20. Jahrhunderts war die Zeit jedoch reif für etwas ganz Neues. Zwei geniale Persönlichkeiten betraten die Bühne in Kiel und schrieben mit dem Kieler Kreiselkompass Weltgeschichte. Wie kam es dazu?
Die zentrale Figur war erstaunlicherweise ein Kunsthistoriker, der aus dem Saarland stammende Hermann Anschütz. Der zweite war einer der berühmtesten Physiker der Welt, Albert Einstein, der vor über 100 Jahren hier in Kiel eine Rede hielt, die für unsere Stadt ein markantes historisches Ereignis war.
Anschütz ließ sich im Jahre 1901 durch die Begegnung mit dem Wiener Polarforscher Julius von Payer für die damaligen hochaktuellen legendären Polarexpeditionen begeistern und hatte die Idee, den Nordpol mit einem Unterseeboot zu erreichen. Anschütz wusste jedoch, dass ein Magnetkompass in der Stahlröhre eines U-Bootes nicht funktionieren würde und dass die Anwendung der Kreiselgesetze das Problem lösen könnte.
Die ersten Erkenntnisse zu einem Gyroskop, übersetzt Kreiselinstrument, hatten der Tübinger Physiker von Bohnenberger im Jahr 1810 und der französischen Physiker Foucault 1851. Deren Grundlagen wiesen dem begabten technischen Erfinder Anschütz mit seiner konstruktiven Phantasie den Weg. Mit Enthusiasmus und großer Beharrlichkeit, auch mit Hilfe des von seinem Adoptivvater Kaempfe geerbten Vermögens, gelang Anschütz-Kaempfe, wie er sich nun nannte, nach 3-jähriger experimenteller Arbeit 1904 die Konstruktion des ersten funktionsfähigen Kreiselkompasses.
Einige Jahre später, das muss an dieser Stelle noch ergänzend erwähnt werden, erfand Anschütz ein weiteres bahnbrechendes Instrument, den für das Fliegen bei schlechter Sicht unentbehrlichen sog. „Künstlichen Horizont“. Man muss es als ein Wunder der Wissenschafts- und Technikgeschichte bezeichnen, dass es dem weder mathematisch noch physikalisch geschulten Kunsthistoriker Anschütz gelang, einen so komplexen, voll funktionsfähigen Kreiselkompass zu entwickeln.
Anschütz demonstrierte seinen 1905 patentierten Kreiselkompass der Kaiserlichen Marine in Kiel, denn für die Marine und auch für die Handelsschifffahrt war seine Erfindung von großer Bedeutung. Deshalb verlegte Anschütz seinen Wohnsitz von München in die Hafen- und Werftstadt Kiel in die Dammstrasse, dem heutigen Lorentzendamm. Dort erinnert eine eher unscheinbare und recht verwitterte Gedenktafel an Dr. Hermann Anschütz-Kaempfe.
Doch Anschütz musste seine patentierte Erfindung gegen einen Nachahmer, den Amerikaner Sperry, vor Gericht verteidigen. Er begegnete dabei 1915 erstmals Albert Einstein, dem vom Gericht bestellten unabhängigen Gutachter. Einsteins Expertise als Direktor des Kaiser-Wilhelm-Instituts für Physikalische Chemie in Berlin und Mitglied der Königlich Preußischen Akademie der Wissenschaften überzeugte das Gericht und Anschütz gewann den Prozess gegen Sperry. Aus dieser Bekanntschaft entwickelte sich mit der Zeit eine intensive Zusammenarbeit und Freundschaft.
Der von Anschütz nach Kiel eingeladene Einstein gab bei der Weiterentwicklung der Technik des Kreiselkompasses während seiner zahlreichen Besuche und auch in den dokumentierten Briefwechseln immer wieder zielführende Ratschläge, die es Anschütz ermöglichten, die noch bestehenden technischen Probleme des hochkomplexen Richtungshalters zu lösen.
Bei seinen Besuchen in Kiel von 1915 bis 1926 wohnte Einstein zunächst im Hause Anschütz in der Bismarckallee, später in einer Wohnung in der Neumühlener Kompassfabrik, die Einstein humorvoll seine „Diogenes-Tonne“ nannte, mit direktem Blick auf die Schwentine und auf den Anlegesteg, an dem der Jollenkreuzer von Anschütz lag. Gemeinsam mit Anschütz oder auch allein segelte Einstein gern auf der Kieler Förde.
Einstein schätzte das beschauliche Kiel. Hier hatte er kaum antisemitische Anfeindungen und Belästigungen zu befürchten, die er in Berlin häufiger erleben musste. Einstein eilte bereits seit 1905 der Ruf eines Ausnahmephysikers voraus, denn in diesem einen Jahr veränderte er mit seiner modernen Physik die Naturwissenschaften seiner Zeit. Als man die Bedeutungen seiner Entdeckungen erfasst hatte, wurde das Jahr 1905 auch später sein Wunderjahr, das „Annus Mirabilis“, genannt.
Er veröffentlichte in diesem Jahr gleich mehrere Entdeckungen. Darunter die „Elektrodynamik bewegter Körper“, die sogenannte spezielle Relativitätstheorie, an der auch seine hochbegabte in Physik und Mathematik ausgebildete 1. Ehefrau Mileva Maric beteiligt war. Außerdem die quantentheoretische Erklärung des Photoelektrischen Effekts, für den er 1921 den Nobelpreis für Physik erhielt. Heute ist dieser Effekt Grundlage für Lichtschranken und nicht zuletzt für den Laser mit seinen unendlich vielen medizinischen und technischen Anwendungen.
Nachdem Ende 1919 seine Allgemeine Relativitätstheorie, die Lichtablenkung durch Gravitationskräfte, durch britische Physiker bestätigt worden war, mussten die bis dahin gültige Theorien von Newton korrigiert werden und Einstein wurde über Nacht weltberühmt. Einladungen und Ehrungen aus aller Welt folgten, unter anderem wurde er als bislang einziger Wissenschaftler mit einer Konfetti-Parade auf dem New Yorker Broadway geehrt.
Umso unverständlicher erscheint aus heutiger Sicht die Weigerung der Kieler Universität, dem inzwischen so berühmten Einstein nur ein Jahr danach, am 15. September 1920, einen Hörsaal zur Verfügung zu stellen. Er musste ins Gewerkschaftshaus in der Legienstrasse ausweichen, wo eine kleine Gedenktafel an dieses historische Ereignis erinnert, jedoch nicht die schöpferische Zusammenarbeit mit Anschütz erwähnt wird.
Am 29. Juli 1929 erhielt Einstein zusammen mit seinem Förderer, dem in Kiel geborenen Nobelpreisträger Max Planck, seinem „Verehrten Meister“ wie Einstein ihn nannte, die höchste Auszeichnung der Dt. Physikalischen Gesellschaft: die Max-Planck-Medaille.
Es war der 10. Jahrestag der Unterzeichnung des Versailler Friedensvertrages und Einstein musste auf dem Weg zu seinem Physikalischen Institut an grölenden nationalsozialistischen Studenten vorbeigehen. Einstein hat diesen Tag nie vergessen, denn ihm wurde klar, dass er Berlin verlassen und aus Deutschland emigrieren musste. Nach Vorträgen in den USA im Dezember 1932 blieb Einstein mit seiner Familie dort, um nicht wieder zurückzukehren. Bis zu seinem Lebensende 1955 lebte er in Princeton und wirkte am dortigen „Institute for Advanced Studies“.
Hermann Anschütz-Kaempfe hatte sich schon Mitte der 20er Jahre aus dem Unternehmen in Kiel nach München zurückgezogen. Er war nur noch Berater der Firma Anschütz und widmete sich mit seinem Vermögen im Rahmen einer Stiftung ganz der Förderung des naturwissenschaftlichen Nachwuchses der Münchner Universität. Er erlebte die Emigration seines Freundes Einstein nicht mehr, denn er verstarb bereits 1931 mit 59 Jahren.
Der Kieler Kreiselkompass und auch der Künstliche Horizont sind bis heute von unverändert eminenter, weltweiter Bedeutung und unersetzlich für die See- und Luftfahrt. Jedes Schiff hat diesen Kompass an Bord und kein Flugzeug kann ohne die beiden in Kiel entwickelten Anschütz-Instrumente fliegen.
Der Philanthrop und geniale Erfinder Hermann Anschütz-Kaempfe und der brillante und philosophisch begabte Physiker Albert Einstein sind weltberühmte Persönlichkeiten. Sie schrieben ein herausragendes technisches, aber auch politisches Kapitel der Kieler Stadtgeschichte. Es wurde begleitet von Antisemitismus und Rassismus jener Zeit, die auch heute in bedrückender Weise wieder zu beobachten sind.
Wegen ihrer in vielerlei Hinsicht überragenden Leistungen und ihrer freundschaftlichen Zusammenarbeit werden Beide seit 2021 mit einem Denkmal an der Kiellinie und auch auf dem Ostufer am Standort der früheren Anschütz-Werke gewürdigt.
Quelle: Dr. R. Habben, Überarbeitung G. Immens
Selbststeuerer - Autopilot
Es sind gewaltige Kräfte erforderlich, um ein Schiff mithilfe des großen Ruderblattes auf Kurs zu halten. Einerseits soll ein Schiff möglichst wendig sein, also einfach gesagt einen kleinen Drehkreis haben; andererseits soll das Schiff mit möglichst geringen Ruderlagen trotzdem sehr präzise gesteuert werden. Dies hat gerade in den letzten Jahren erheblich an Bedeutung gewonnen.
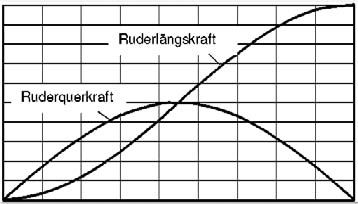
Jede Bewegung des Ruderblattes führt zu zwei verschiedenen Kräften. Die „Ruderquerkraft“ ist die Komponente, welche das Drehmoment bewirkt, während die „Ruderlängskraft“ eine rein bremsende Wirkung ist. Und jede Bremskraft macht das Schiff langsamer oder anders gesprochen: Kostet wertvolle Energie!

Ziel muss es also sein, die Anfangs-Querkraft zum Steuern auszunutzen, bei der die bremsende Wirkung nur gering ist. Auf der Grafik ist auch gut erkennbar, warum die maximale Ruderlage eines Schiffes bei weniger als 40° liegt; eine größere Ruderlage würde das Schiff nur noch bremsen, aber kein größeres Drehmoment erzeugen.
Das geniale an der Weiterentwicklung des Selbststeuers der Firma Anschütz war die Definition nur weniger Parameter, mit denen sich der Autopilot einstellen lässt um bei den verschiedensten Bedingungen den Kurs präzise und gleichzeitig ökonomisch einzuhalten. Gleichzeitig muss der Autopilot aber auch eine eingegebene Änderung des Kurses schnell und ebenfalls ohne zu viele Ruderlagen durchführen können. Dies gilt unverändert noch heute. Die Bedeutung der Parameter erläutern wir hier:

Die erste Größe, die eingegeben wird, ist das „Gieren“ (engl. „Yawing“). Das Gieren eines Schiffes ist insbesondere bedingt durch Seegang, d.h. das Schiff wird von den Wellen vom Kurs abgelenkt, dreht aber im folgenden Wellental ohnehin auf den alten Kurs zurück. Hier würde bei sehr schlechtem Wetter das Ruder permanent hin und her arbeiten, obwohl das Schiff von alleine zurück zum Kurs dreht. Also muss die Anlage „tolerant“ gegenüber solchen Schwankungen eingestellt werden. Im Nord-Ostsee-Kanal würde man aber z.B. immer verlangen, dass ein Schiff den Kurs absolut präzise einhält und deshalb einen kleinen Wert eingeben.
Der zweite Wert „Rudder“ gibt an, wie stark das Ruder gelegt wird. Will man auf See eine sanfte Kurve zum nächsten Kurs fahren, ist hier ein niedriger Wert ausreichend und das Ruder muss nicht so stark gelegt werden. Auf engen Revieren hingegen muss eine Kursänderung möglichst schnell vollzogen werden.
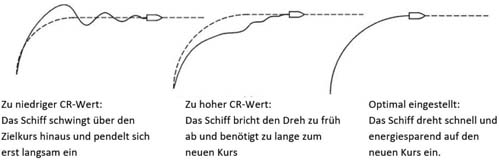
Der dritte Wert ist das „Gegenruder“ (engl. „Counterrudder“, CR). Mit diesem Wert gibt man an, wie stark und frühzeitig der eingeleitete Dreh durch Gegenruder aufgefangen wird. Die Grafik verdeutlicht dies:
Man geht davon aus, dass falsche Einstellungen des Autopiloten für bis zu 10% höheren Brennstoffverbrauch verantwortlich sind. Die neuen Selbststeueranlagen der Firma Anschütz bieten zusätzlich einen „Lerneffekt“ des Systems; solche „adaptiven Autopilots“ passen sich automatisch den Bedingungen und dem Ladezustand des Schiffes an.
Funktionsweise des Radargerätes
Am grundlegenden Prinzip der Radartechnik hat sich bis heute nichts geändert. Jeder kennt die signifikante sich drehende Antenne (genannt: Scanner) hoch im Mast eines Schiffes.
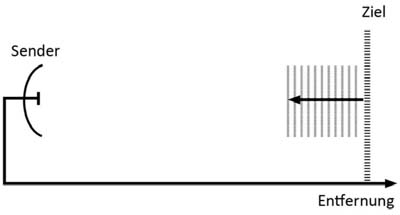
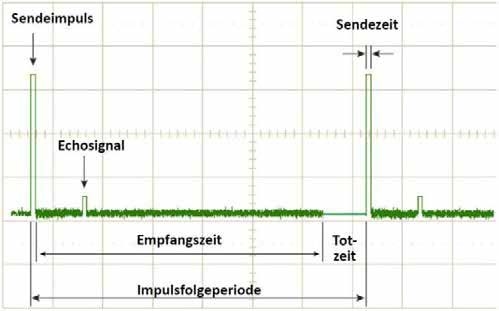
Zur exakten Lokalisierung eines Zieles benötigt man erstens die Richtung, in der es erfasst wurde und zweitens die Laufzeit der elektromagnetischen Welle zum Ziel und als Echo wieder zurück.
Es kommt aber trotz der hohen Sendeleistung von 50 KW nur ein kleiner Teil beim Ziel an und davon wiederum nur ein Bruchteil zurück (Die Abschwächung auf dem Weg hin und zurück beträgt die 4. Potenz der Entfernung).
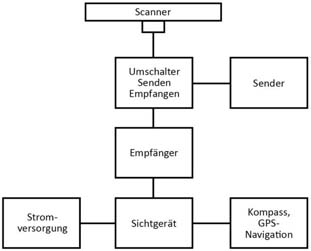
Wirklich beeindruckend ist hierbei die Technik der gleichzeitigen Nutzung des Scanners als Sender und Empfänger, denn der „Umschalter“ muss rasend schnell arbeiten: Die Folge der Impulse beträgt bis zu 2.250 Wechsel pro Sekunde zwischen Senden und Empfangen. Vor dem Senden eines neuen Signals muss erst einmal die Rückkehr des vorherigen abgewartet werden, um die Entfernungsmessung zu ermöglichen. Die Grafik zeigt anschaulich, dass der Sendeimpuls nur extrem kurz ist (zwischen 0,8 und 0,08 μsec), während danach ein deutlich längeres „Lauschen auf das Echo“ erfolgt. Die heute üblichen Radargeräte arbeiten übrigens in zwei sehr hohen Frequenzbereichen, dem X-Band (9,2-9,5 GHz bzw. 3,2-3,3 cm Wellenlänge) oder dem S-Band (2,9- 3,1 GHz bzw. 9,7-10,3 cm Wellenlänge).
Kommunikation - „Malen nach Zahlen“
Geradezu lebenswichtig sind für die Seeleute auf den Weltmeeren möglichst präzise Wetterberichte.
Dabei geht es nicht nur um die Gefährdung von Schiff und Besatzung, sondern immer auch darum, sensible Ladung mit hohen Werten unbeschädigt und verlustfrei ans Ziel zu bringen.

Mit der Erfindung des Morsecodes über starke Kurzwellensender wurde es möglich, den Schiffen für jedes Gebiet der Erde eine präzise Wetterlage zu übermitteln. Es wurde also nicht nur eine relativ unpräzise Windvorhersage für bestimmte Seegebiete gesendet, sondern eine komplexe Wetterkarten-Analyse, die ein Bild der Lage von Druckgebilden und Fronten, sowie deren Intensität und Zugrichtung wiedergab. Welch gewaltige Vereinfachung die Wetterkartenschreiber der Firma Hell darstellten, wird erst deutlich, wenn wir Ihnen erklären, wie es vorher funktionierte. Das war das von den Seeleuten liebevoll so genannte „Malen nach Zahlen“…
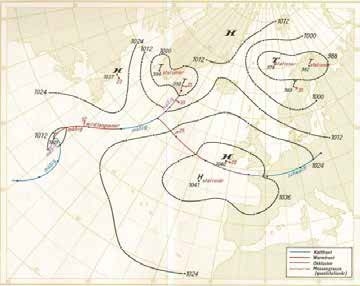
Von den Meteorologen an Land wurde die Wetterkarte zunächst auf die wichtigsten Elemente reduziert. So sah danach zum Beispiel die Wetterlage am 25.02.1949 um 00.00 UTC aus:
Alle hier dargestellten Angaben wurden dann komplett in eine Zahlenfolge codiert. So erhielt der Nautiker an Bord dann vom Funker – gesendet um 05.20 UTC über „Whitehall-Radio“ – den folgenden Funkspruch:
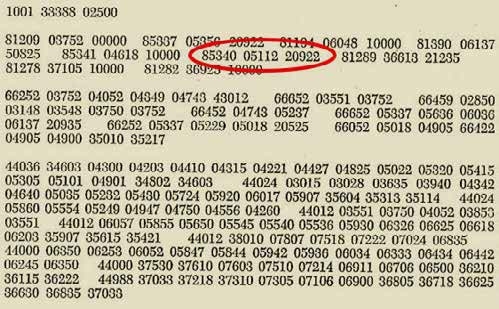
Und damit beginnt dann das „Malen nach Zahlen“! Wollen wir uns mal gemeinsam den Funkspruch genauer ansehen?
Die erste Zeile ist die „Einleitungsgruppe“ und der erste Block bedeutet übersetzt: „Jetzt folgt eine Analyse!“. Die dann folgende Gruppe 33388 bestimmt das Seegebiet, damit der Nautiker den richtigen Malvor-druck zur Hand nimmt. 02500 bestimmt den Zeitpunkt der Analyse, also der 25. des Monats um 00.00 UTC.
Dann folgen Dreierblöcke, die jeweils mit einer 8 beginnen. Diese Zahl bedeutet „Druckgebilde“. Beim zweiten Block wird eine Zahlengruppe immer von der 66 eingeleitet und kennzeichnet „Fronten“. Beim dritten Block fällt Ihnen gleich die 44 auf und damit sind „Isobaren“ gemeint.
Wollen wir mal das Hochdruckgebiet aus der Karte oben bei Irland suchen? Dies finden Sie im ersten Block in der Mitte der zweiten Zeile: 85340 05112 20922. Und die Übersetzung lautet:
8 = „es folgt ein Druckgebilde“, 5 = „ein Hochdruckgebiet“, 3 = „es wird sich verstärken“, 40 = „1040 Millibar“
0 bedeutet „es folgt eine Ortsbestimmung“, 51 die geografische Breite und 12 die geografische Länge
Dann folgt die Meldung der Verlagerung; 2 = wenig Änderung, 09 = Zugrichtung 090°, 22 = Zuggeschwindigkeit in Knoten.
Haben Sie dies alles oben in der Karte zeichnerisch umgesetzt gefunden? Und dieses System muss mit jeder Zahlengruppe abgearbeitet werden. Das Buch zur Dekodierung finden Sie in unserer Ausstellung.
Nun dürfte deutlich werden, was für ein Aufwand das Zeichnen einer solchen Wetterkarte bedeutete und wieviel einfacher es dann war, als eine komplett fertig gedruckte Wetterkarte aus dem Hellfax-Wetterkartenschreiber nach kürzester Zeit und dann noch mehrmals am Tag auf dem Tisch lag …
Was bedeutet „Portolankarte“ ?
Der Begriff Portolan (abgeleitet von lateinisch portus „Hafen“), bezeichnete ursprünglich ein Buch mit nautischen Informationen wie Landmarken, Leuchttürmen, Strömungen und Hafenverhältnissen. Die Verwendung dieses Begriffs ist erstmals für das Jahr 1285 belegt. Die Portolane bildeten die Grundlage für die spätere bis nach Nordeuropa reichende Entwicklung der Seebücher. Ab dem 16. Jahrhundert erweiterte sich die Begriffsbedeutung und umfasste fortan nicht nur den Text, sondern auch die ihn begleitenden Seekarten.
Die älteste überlieferte Portolankarte, die „Pisaner Karte“, stammt aus dem letzten Viertel des 13. Jahrhunderts. Sie entstand zur selben Zeit wie der erste mittelalterliche Portolan, der „Compasso da navegare“. Die frühen Portolane umfassten hauptsächlich das Mittelmeer und das Schwarze Meer. Portolankarten des 13. und 14. Jahrhunderts sind auf Pergament gezeichnet und entweder als gebundene Atlanten oder als einzelne Karten ausgeführt.
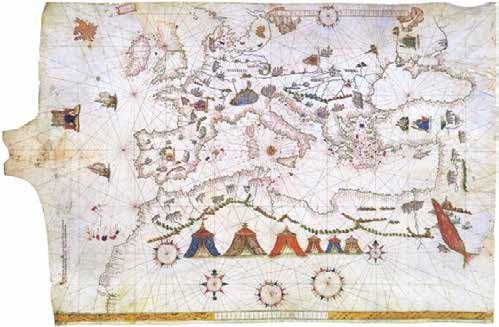
Ein wesentliches Merkmal der Portolankarten ist das sichtbare Liniennetz, das jedoch nicht auf die Konstruktion der Karte zurückgeht, sondern zur Kursbestimmung mittels Kompass dient. Dieses Liniennetz besteht aus verschiedenfarbigen Geraden, auch Rumbenlinien genannt, die sowohl vom Zentrum der Karte als auch von 16 gleichmäßig auf einer Kreislinie verteilten Punkten („Windrosen“) ausstrahlen. Die Linien der jeweils vier Haupt- und Zwischenhimmelsrichtungen sind schwarz, die der Halb-Winde grün, die der Viertel-Winde rot eingetragen. Diese traditionelle Farbgebung wurde mehr als vier Jahrhunderte hindurch unverändert beibehalten. Im Bild eine Karte aus dem Jahr 1541.
Die Portolankarten weisen eine unterschiedliche Orientierung auf und sind nicht immer „genordet“. Der Seemann, der die Karte benutzte, drehte sie in die Richtung des jeweils verfolgten Kurses. Gefährliche Passagen waren in der Karte hervorgehoben und mit Eintragungen wie „Gib acht!“ oder „Öffne das Auge“ kommentiert. Die Anlegeplätze wurden in verschiedenfarbiger Tinte, je nach ihrer Wichtigkeit, eingetragen. Wenn ihm die auf der Karte enthaltenen Angaben nicht ausreichten, konnte der Seemann den Text des Portolans mit seinen detaillierteren Angaben zur Hand nehmen.
Unsere ausgestellte Karte kennzeichnet die späte Phase vor dem Übergang zur „Mercatorkarte.
Quelle: Wikipedia, Überarbeitung G. Immens
Prinzip der Mercatorkarte
Im 16. Jahrhundert erlebt die Kartographie durch die Lösung eines großen Problems einen rasanten Aufschwung. Die bis dahin üblichen „Plattkarten“ stellten die Navigatoren vor ein großes Problem beim Zeichnen des Kurses über längere Distanzen, denn aufgrund der Kugelform der Erde war ein solcher Kurs niemals „winkeltreu“.
Im Jahr 1569 hat der aus Flandern stammende und in Duisburg an der neu gegründeten Universität lehrende Gerhard Krämer (seinen Namen hatte er wie damals üblich latinisiert in Gerhardus Mercator) die entscheidende Idee und revolutioniert damit die Kartographie. Er korrigiert die Verzerrung der Plattkarte und schafft die erste winkeltreue Karte.
Er projiziert die Erdoberfläche in einen Zylinder mit dem Innendurchmesser des Äquators. Das Prinzip wird hier deutlich:
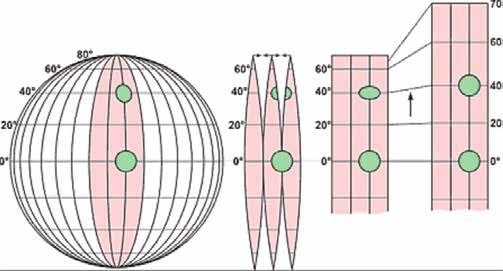
Zunächst wird die Erde an den Längengraden geschnitten aufgeklappt. Zur Verdeutlichung beachten Sie die beiden Kreise: Am Äquator hat dies kaum Auswirkungen, der Kreis bei 40°-Breite ist zerschnitten und wird für die Zylinderprojektion wieder zusammengefügt. Dabei wird er aber zur Ellipse. Mercator dehnte den Zylinder nach Norden hin immer weiter aus, bis der Kreis wieder rund ist und die Karte somit winkeltreu.
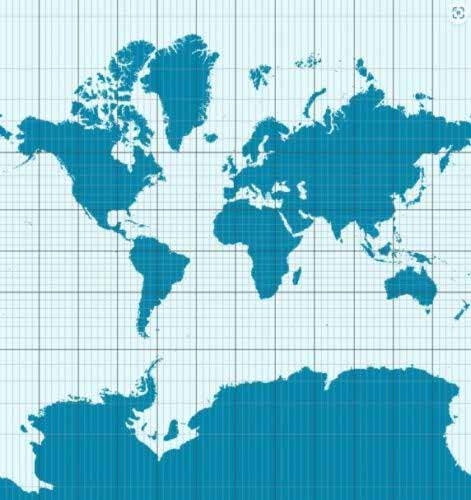
Gleichzeitig ist in der Grafik aber erkennbar, dass die Karte bei gleicher Linie zum Äquator nunmehr nach Norden stark anwächst. Es muss also in Kauf genommen werden, dass die Karte nun nicht mehr „flächentreu“ ist. Dies wird besonders erkennbar an der Mercator-Weltkarte. Die Antarktis ist größer als die gesamten übrigen Landmassen der Erde, Grönland ist etwas größer als Afrika.
Dies wird auch deutlich, wenn die Fläche Deutschlands in der Mercatorkarte auf der geografischen Breite Grönlands dargestellt wird:

Diese Nachteile lassen sich aber in Kauf nehmen, denn entscheidend ist der Vorteil, jetzt mit einer gerade gezeichneten Kurslinie das Ziel zu erreichen.
Das Ende aller Probleme für die Seeleute? Mitnichten, denn über große Distanzen fährt nunmehr ein Schiff mit dem in der Mercatorkarte eingezeichneten Kurs einen „Umweg“. Kompliziert?
Wir versuchen auch dies zu erklären:
Die Verbindung von Deutschland nach Los Angeles ist in der Mercatorkarte die Magenta farbige Linie als scheinbar direkte und kürzeste Verbindung.

Aber machen Sie doch einmal in Gedanken den Prozess der Mercatorkarte rückgängig. Auf der Kugel ergibt sich dann die gelbe Linie und damit ist dies erkennbar die in der Realität geltende kürzeste Verbindung. Vielleicht ist Ihnen schon einmal aufgefallen, dass Flugzeuge auf Interkontinentalflügen sehr weit nördlich fliegen, also in unserem Beispiel über Schottland und dann die Südspitze Grönlands, obwohl doch der kürzeste Weg in der uns vertrauten Mercator-Karte quer über den Atlantik verlaufen würde.
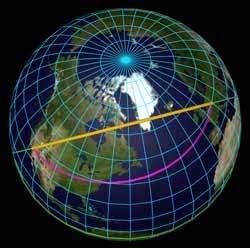
Ein Navigator, der natürlich möglichst schnell und mit niedrigem Kraftstoffverbrauch ans Ziel kommen will, kann also über große Distanzen nicht den geraden Kurs steuern, sondern er fährt den sogenannten „Großkreis“ ab. Moderne Navigationssysteme berechnen dies automatisch.
Mehr zum „Nautoplot“
Zu Beginn der Satellitennavigation gab es keine ständig verfügbare Position. Das System basierte auf dem Empfang der Signale von um die Erde kreisenden Satelliten, von denen es nur sehr wenige gab. So konnte manchmal über eine Stunde vergehen, bis das System einen neuen präzisen Ort vermeldete, der natürlich dann ein paar Minuten in der Vergangenheit lag. Trotzdem war dies ab ca. 1970 im landfernen Seeraum eine gewaltige Verbesserung gegenüber der astronomischen Navigation. Die Initiative zum einem ständig verfügbaren GPS („Global Positioning System“) begann Anfang der 80er-Jahre und ab ca. 1985 stand ständig eine durch die neue Technik ermittelte Position zur Verfügung.
Der Nautiker musste fortan nur die geographische Länge und Breite auf einem Display ablesen und in die Karte übertragen. Der von der Kieler Firma Raytheon-Anschütz entwickelte „Nautoplot“-Kartentisch war die erste bestehende Möglichkeit, den durch Satelliten ermittelten Ort direkt in der Seekarte durch einen Leuchtpunkt jederzeit anzuzeigen. Der Nachteil war allerdings, dass bei jedem Wechsel der Karte das System neu kalibriert werden musste. Dieses System konnte sich nie wirklich durchsetzen und fand in erster Linie bei der Marine Verwendung. Unser gezeigtes Stück war auf einem U-Boot der Bundesmarine im Einsatz.
Völlig verschwanden diese Geräte dann mit der Entwicklung der elektronischen Seekarten …
Text: G. Immens
Mehr zur „ECDIS“ und was ist eigentlich AIS?
Solche Systeme sind heute Standard auf allen Schiffen und unter bestimmten Voraussetzungen darf bei modernen integrierten Brückensystemen komplett auf die Seekarte aus Papier verzichtet werden. Die Vorteile liegen auf der Hand: Keine Kartenwechsel, ständig angezeigte Position des Schiffes und jede nautische Veränderung kann als Datensatz eingefügt werden.
Zusätzlich besteht meist die Möglichkeit der manuellen Konfiguration (Schiffsabhängige Definition von Tiefenlinien, etc.) und mit dem sog. „Overlay“-Verfahren können andere System wie zum Beispiel das Radarbild integriert werden; es wird also z.B. das Bild der Seekarte vom Bild des Radars „überlagert“. Seit der Einführung des AIS („Automatic Identifikation System“) können nun auch andere Schiffe direkt auf dem Bildschirm angezeigt werden.
Was aber ist AIS und wie funktioniert dies?
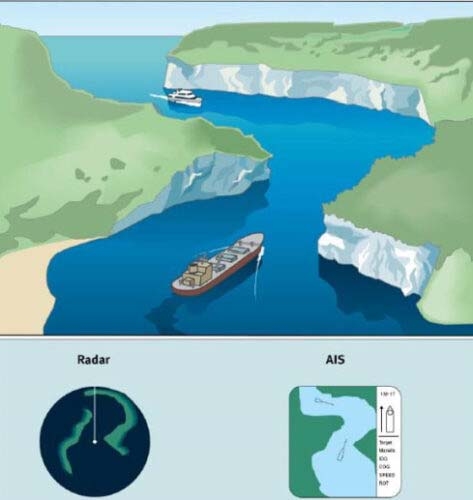
Beim Automatischen Identifikationssystem AIS senden die Schiffe per Funk kleine Datenpakete (z.B. Abmessungen, Position, Kurs und Geschwindigkeit, Zielhafen, etc.) nach einer festgelegten Zeitsystematik aus. Im Gegensatz zum Radar wird also nicht nur ein Echo sichtbar, sondern eine genaue Identifizierung des anderen Schiffes möglich. Zusätzlich ist auch der „Blick“ erheblich erweitert, weil es keine Abdeckung wie beim Radar gibt. Der Unterschied wird im Vergleich beider Systeme deutlich:
Beide Schiffe könnten sich in dieser Meerenge auf dem Radar nicht sehen. Im AIS hingegen sind beide Schiffe mit allen erforderlichen Informationen sichtbar und können aufgrund der eindeutigen Identifikation miteinander kommunizieren.
Dieses Verfahren wurde bereits Anfang der 90er-Jahre nach dem Vorbild aus der Luftfahrt entwickelt, bei den Reedern bestand aber zunächst wenig Interesse. Durch die furchtbaren Terroranschläge von New York im Jahr 2001 wurde dieses System zunächst in den USA und kurz danach weltweit zur Pflicht, um eine lückenlose Überwachung anlaufender Schiffe zu gewährleisten. Alle Schiffe ab einer Größe von 300 BRZ sind seit 2004 zu einer Ausrüstung und Nutzung von AIS verpflichtet.
Überlagert man nun im „Overlay“ die AIS-Signale mit dem Radarbild, so können alle Echos von Schiffen mit AIS eindeutig zugeordnet werden. Bei einem zusätzlichen Overlay mit der elektronischen Seekarte sind dann sogar Tonnen und Küstenlinien eindeutig identifizierbar:
Hier werden die Daten des Radargerätes in dem hellen gelb dargestellt und auf jedem Radarecho eines Schiffes sieht man in grün dessen AIS-Daten, die dann per Mausklick detailliert abgerufen werden können. Die Tiefenangaben und die genaue Darstellung z.B. der Schleusen entstammen der Seekarte. In der Mitte des Bildes kann jetzt das Radar einer Tonne ganz eindeutig zugeordnet werden …
Text: G. Immens
Der Kompassstand „Reflecta/1“ mit dem Magnetkompass „Typ/11“
Dieser Kompassstand ist ca. 1977 entwickelt worden und 1979 erstmalig (damals noch beim Deutschen Institut für Seeschifffahrt und Hydrographie) Baumuster geprüft. Seitdem gab es nur geringe fertigungstechnische Änderungen. Die Ursprünge dieses Kompasses und Standes wurden irgendwann in den 1960ern entwickelt. Der Kompassstand „Reflecta/1“ mit seinem Magnetkompass „Type/11“ ist für die weltweite Fahrt auf Schiffen mit einer Bruttoraumzahl von über 300 GT konzipiert. Er dient der Navigation im Notfall, da er im Gegensatz zum elektronischen Gyro-Kompass auch im stromlosen Zustand funktioniert. Zusätzlich können mit ihm auch Peilungen vorgenommen werden. Der Kompassstand ist mit Vorrichtungen versehen, mit denen man den magnetischen Einfluss des verbauten Stahls im Schiff auf den Magnetkompass ausgleichen kann. Dazu gehören die auffälligen sogenannten „D-Kugeln“ an der Seite und die „Flinterstange“ vorne am Gehäuse sowie die nummerierten Löcher unten an den geöffneten Klappen.
Funktionsprinzip und Fehler des Magnetkompass
Aber wie funktionieren eigentlich dieser Ausgleich der Schiffseinflüsse und damit das „Kompensieren des Magnetkompass“?
Über die Jahrhunderte hinweg hat sich der Magnetkompass von einer einfachen Nadel die auf eine Spitze aufgelegt war, über den Trockenkompass zum heutigen kompensierten Fluid Kompass entwickelt. Dieser kann seine Anzeige über Spiegel zum Steuerstand oder auch elektronisch auf beliebig viele „Tochterkompasse“ übertragen. Noch heute ist der Magnetkompass als Notkompass vorgeschrieben. Er steht meistens ganz oben auf dem Peildeck (über der Brücke) in der Mittschiffslinie. Dort wird er am wenigsten von den umgebenden Eisenmassen des Schiffes und von der Elektronik der Geräte (insbes. Gleichstrom) beeinflusst.
Leider hat jeder Magnetkompass drei Fehler die bei der Navigation berücksichtigt werden müssen:
1. die Deklination(auch Missweisung oder Variation genannt)
2. die Deviation(Fehlanzeige durch Eisenmassen an Bord)
3. die Inklination, die aber nur bei der Navigation in der Nähe der
magnetischen Pole eine Rolle spielt
Die Deklination:
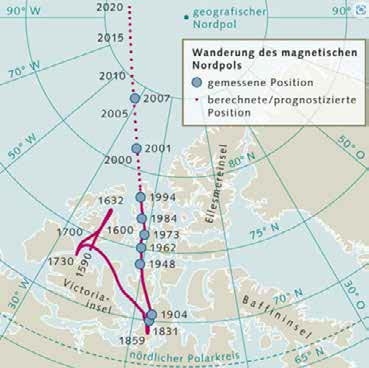
Da der magnetische Nordpol nicht mit dem geografischen Nordpol übereinstimmt und etwa 1000 km entfernt im Norden Kanadas liegt ergibt sich von jedem Standpunkt aus eine unterschiedliche Fehlanzeige. Zusätzlich wandert der magnetische Pol um mehrere Kilometer im Jahr (siehe dazu auch die Grafik unseres QR-Codes zum Kreiselkompass). Auf hohen nördlichen Breiten kann der Fehler bis zu 35 Grad betragen, hier in Nord- und Ostsee ist er recht gering. Er ist auf der am Kartentisch ausliegenden Seekarte eingetragen. Die Abweichung ist jedoch für jeden Magnetkompass gleich und kann damit bei der Berechnung des zu steuernden Kurses berücksichtigt werden.
Die Deviation:
Da Schiffe aus Weicheisenmassen bestehen, die einen eigenen Magnetismus haben, wird der Magnetkompass individuell von Schiff zu Schiff unterschiedlich abgelenkt. Diese Abweichung nennt man Deviation. Sie ist so groß, dass der Magnetkompass unbrauchbar wäre, würde er nicht regelmäßig manuell kompensiert. Diese Aufgabe übernehmen speziell ausgebildete „Kompassregulierer“; hier in Kiel wird der Dienst von einigen Lotsen angeboten.
Die Kompensation erfolgt durch Stabmagnete, die unter der Rose angebracht werden, damit diese z. B. die diagonalen Magnetfelder ausgleichen. Horizontale und vertikale Magnetfelder werden durch weitere Stabmagnete und die beiden großen – an unserem Modell schwarzen – D-Kugeln kompensiert. Die Stärke des Einflusses der Stabmagnete wird durch den Abstand zum Kompass geregelt, daher die Nummerierung in den Steckfächern. Zur Kompensation der Veränderungen zwischen Nord- und Südhalbkugel dient im Wesentlichen die Flinterstange. Dies ist ein großes Rohr, das in einem Rohr außen und vorne am Kompassgehäuse an einer Kette hängt. Zusätzlich schützt die Flinterstange den Kompass vor dem Einfluss z.B. von Containern auf dem Deck vor der Brücke.
Der Schiffsmagnetismus ändert sich auf verschiedenen Kursen, deswegen muss ein Schiff bei der Kompensation einen Deviationsdrehkreis absolvieren. In Kiel passiert dies meist vor dem Kieler Marinehafen. Dabei wird ein „Referenzobjekt“ (Landobjekt, Bake, Leuchtturm usw.) gleichzeitig mit dem Kreiselkompass und dem Magnetkompass alle 5-10 Grad gepeilt. Die Fehler lassen sich auch bei bester Arbeit des Kompensierers nicht vollständig beseitigen. Die Differenz zwischen beiden (korrigierten) Peilungen ist die Restdeviation, die in einer Deviationstabelle festgehalten wird und dann ebenfalls beim zu steuernden Kurs berücksichtigt werden muss.
Liegt ein Schiff monatelang in der Werft oder an einer Pier, so richten sich die Magnetstäbchen im Eisen in eine Richtung aus, was die gesamte Deviation verändern kann. Dies ist jedoch ein sogenannter „Halbfester Magnetismus“, der sich mit der Zeit auf wechselnden Kursen wieder ändern kann.
Die Inklination:
Würde eine Kompassnadel frei aufgehängt, so würde diese nur im Bereich des Äquators waagerecht parallel zur Erdoberfläche liegen. Die Anzeige teilt sich also in eine Vertikal- und Horizontalkomponente. Die Feldlinien des Erdmagnetismus zeigen im Bereich der magnetischen Pole nahezu senkrecht zum Erdkern und deshalb ist dort ein Magnetkompass nicht zu verwenden. Einen Kreiselkompass beeinflusst dies nicht. In unseren Breiten kann aber der Einfluss der Inklination negiert werden.